 English▼
English▼




- 배터리 파일럿 / 생산 라인
- 배터리 실험실 조립
- Lithium Battery Pack Assembly Line
- Solid State Battery Assembly Line
- Sodium Ion Battery Production Line
- Supercapacitor Assembly Line
- Lithium Ion Battery Recycling Plant
- Dry Electrode Preparation Solution
- Perovskite Based Solar Cell Lab Line
- 리튬 이온 배터리 자료
- 배터리
- Battery Pack Machine & Compoments
- Battery Pack Compoments
- Turnkey Solutions Battery Pack Assembly Line
- Cell Sorter
- Battery Pack Spot Welder
- Laser Welder
- Battery Charging Discharging Tester
- Battery Pack Aging Machine
- Battery Pack Comprehensive Tester
- CCD Visual Inspector
- Battery Pape Sticking Machine
- BMS Testing Machine
- Al Wire Bonding Machine
- 모든 배터리 조립기
- Lithium Battery Production Plant
- 진공 글로브 박스
- 용광로
- Coaters
- PVD Coater
- 수압기
- Large Press Machine
- 행성 원심 믹서 / 밀
- 볼 밀
- 실험실 기계
- Cutting Machine
- 금속 전극 거품
- WhatsApp : +86 18659217588
- 메일 주소 : David@tmaxcn.com
- 메일 주소 : Davidtmaxcn@gmail.com
- : No. 39, Xinchang Road, Xinyang, Haicang Dist., Xiamen, Fujian, China (Mainland)

프리즘 배터리 생산을 위한 자동 다이 커팅 머신
Model Number:
TMAX-YK-DP400-L01B지불:
L/C D/A D/P T/T Western UnionDelivery Time:
5 days
- WhatsApp : +86 18659217588
- 메일 주소 : David@tmaxcn.com
- 메일 주소 : Davidtmaxcn@gmail.com
- Wechat : 18659217588
프리즘 배터리 생산을 위한 자동 다이 커팅 머신
1 、 장비 소개
1. 장비 기능
* 풀림 기능(2개의 풀림 메커니즘이 채택되고 서보 모터가 자동 풀림을 독립적으로 제어함);
* 편차 보정 기능(풀림 기구의 편차 보정 및 전극 펀칭 전에 운송 중입니다);
* 벨트 장력 제어 시스템(벨트 장력은 두 개의 버퍼 모드에 의해 독립적으로 제어되어 높은 다이 커팅 과정에서 벨트 지터를 줄일 수 있음);
* 금속 오목 볼록 다이는 극 귀의 성형을 완료하는 데 사용됩니다 (텅스텐 강철 다이가 사용되며 수명이 길고 펀칭 버가 작음).
* 장비 롤러의 먼지 제거(풀링 롤러의 먼지 흡수);
* 다이 커팅 전에, 전극 솔질하고 진공 청소기로 청소합니다.
* 단일 칩 절단 기능(서보 제어 크랭크축 드라이브 구조를 채택하여 절단을 완료하고 텅스텐 강철 금형을 채택하여 수명이 길고 펀칭 버가 작음);
* 하나의 전극 운반 기능(3개의 진공 벨트를 사용하여 전극 , 양쪽 먼지 제거 전극 운송 과정에서 결함 제품의 스크리닝이 수행됩니다.)
* 양쪽 먼지 제거 전극 (기본적으로 양모 펠트 및 음압 집진, 비접촉식 정전기 먼지 제거 장치 예약) 이 먼지 제거 방법은 선택 사항입니다.
* 이중 CCD 검출 및 라벨링 전극 표면 결함(CCD는 표면의 양면을 감지합니다. 전극 , 라벨링 기계는 검출 후 부적격 제품에 라벨을 붙이고 폴 이어가 형성될 때 이 섹션을 당깁니다. 장비에는 기본적으로 이 기능이 없으며 설치 위치가 예약되어 있습니다.) 이 기능은 선택 사항입니다.
l 결함 제품의 색상 코드 감지(감지 전극에 결함 라벨이 있고 전극 장치가 결함 제품을 자동으로 걸러냄);
* 하나의 전극 크기 CCD 감지(각 전극 전체 크기 감지, 장비는 결함이 있는 제품을 자동으로 걸러냅니다.)
* 전극 수집 기능 ( 전극 계수 기능은 분류 기능과 함께 재료 상자에 설치됩니다. 전극 s, 그리고 전극 s는 재료 상자에 깔끔하게 수집됩니다.)
* 카트리지 케이스 변환 및 운반 기능(카트리지가 턴테이블에 설치되고 카트리지 케이스가 자동으로 변환되며 매니퓰레이터가 카트리지 케이스를 추출하고 재료 라인을 연결함) 카트리지 케이스를 라미네이션 기계와 공유할 수 있습니다.
2. 장비 원리
폴라 코일의 연속 공급 원리, 전자 캠 모드를 통한 다이 펀칭 및 폴라 임펄스 제어, 서보 트랙션에 의한 비균등 거리 제어.
3. 장비 동작 프로세스
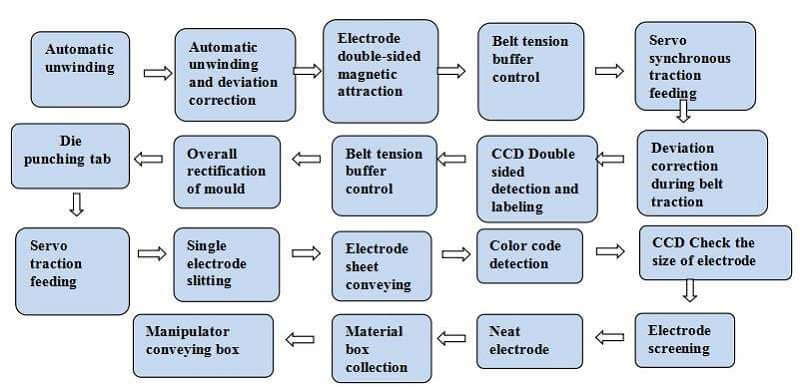
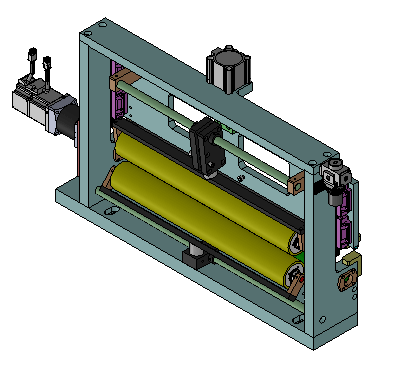
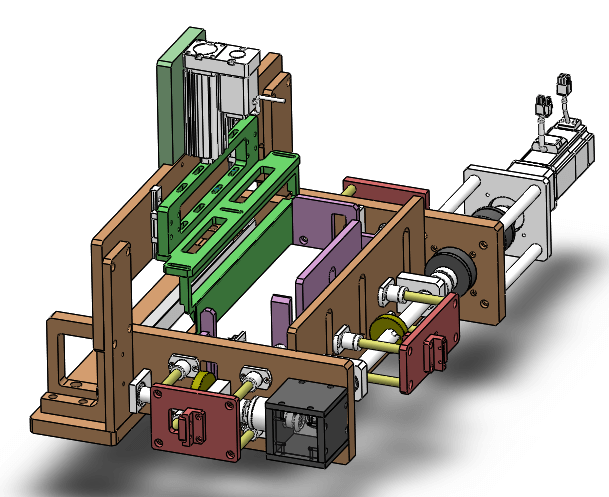
4. 전체 구조
1) 크기 : 4200 mm 엘 ; 여 : 1 2 8 0mm ; 시간 : 2050mm 。
2) 무게 : 1.85 티
삼) 전체 구조 다이어그램
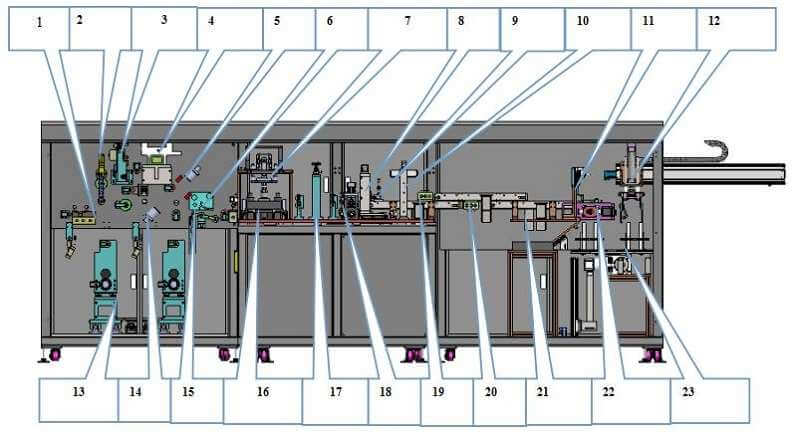
1. 上料接料台: 공급 및 수신 플랫폼
2. 张力缓存机构 : 장력 완충 메커니즘
삼. 滚轮牵引机构: 롤러 견인 메커니즘
4. 过程纠偏组件 : 프로세스 수정 구성요소
5. CCD 检测 : CCD 테스트
6. 贴胶机 :접착제 어플리케이터
7. 极耳成型模切组件 : 탭 성형 다이 커팅 어셈블리
8. 裁切机构 : 절단 메커니즘
9. 色标传感器 :색상 코드 센서
10. CCD 检测机构 : CCD 검출 메커니즘
11. 次品剔除机构 : 거부 메커니즘
12. 机械手抓取机构 :매니퓰레이터 잡기 메커니즘
13. 自动放卷纠偏装置 : 자동 풀림 및 편차 보정 장치
14. CCD 检测 :CCD 테스트
15. 缓存机构 : 캐시 메커니즘
16. 模具冲切机构 : 다이 펀칭 메커니즘
17. 转型调节机构 :환산조정기관
18. 滚轮牵引机构 :롤러 트랙션 메커니즘
19. 除尘机构 : 먼지 제거 메커니즘
20. 除尘机构 : 먼지 제거 메커니즘
21. 次品收集盒 :불량품회수함
22. 整齐料盒极片机构 :깔끔한 재질의 상자 전극 메커니즘
23. 转化料盒机构 :변환 상자 메커니즘
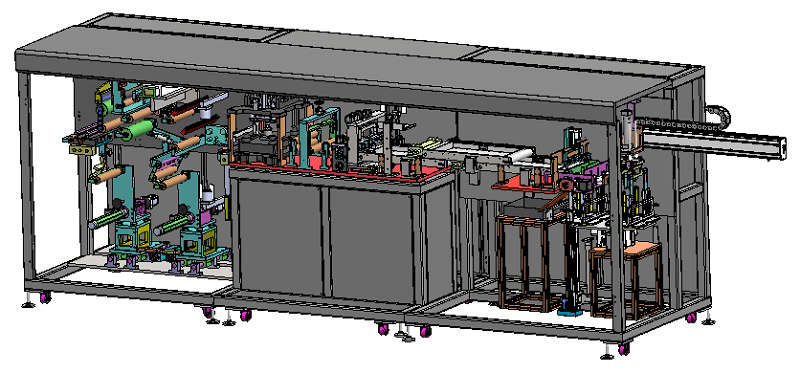
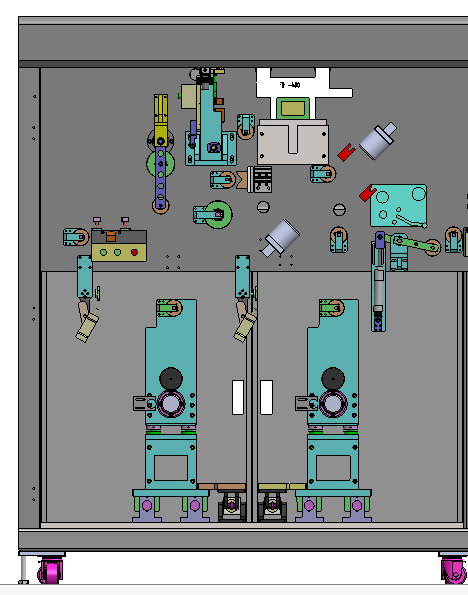
4) 장비 외관도
4 、 장비 구성 요소의 기능 소개
1. 자동 공급 장치
엘 최대 직경 : φ700mm ;
엘 최대 무게 : 150kg ;
엘 슬리브 내경 : 150.2±0.5mm ;
엘 풀기 및 공급 모드: 공급은 물류 도킹 트롤리 또는 수동으로 직접 작동됩니다. ;
엘 풀기 메커니즘은 팽창식 샤프트 구조를 채택하고 팽창식 샤프트의 양단에는 견고한 구조의 롤링 베어링이 장착되어 있습니다. ;
엘 코일링 벨트 연결 플랫폼과 수동 벨트 연결에 편리한 보조 마킹 라인이 장착되어 있습니다. ;
엘 수신 테이블 뒤에 40000gs의 영구 자석 막대가있어 전면과 후면에서 철을 제거합니다. 전극 ;
엘 다이 커팅 전 폴라 피스의 양면 롤러 브러시로 집진 ;
엘 다이 커팅 전 프레싱 장치 포함 ;
엘 서보 시스템은 장력을 안정적으로 유지하기 위해 동시 풀림을 제어하는 데 사용됩니다. ;
엘 조정 가능한 장력 범위는 0-150입니다. N , 정확도는 ±10% ;
엘 상부 및 하부 재료 전후에 릴링 샤프트 흔들림≤5mm ;
엘 와인딩 샤프트의 단면에서 보호 커버 외부까지의 거리≤250mm ;
엘 안전 보호 설계 ;
엘 편차 보정 시스템은 고정밀 CCD 편차 보정 센서를 채택하여 반대쪽을 제어하고 편차 보정 정확도 ±0.2mm를 향상시킵니다. .
1. 벨트 장력 제어 시스템
엘 재료 벨트의 풀림 장력 제어는 두 가지 메커니즘으로 구성됩니다. ;
엘 공기 팽창 샤프트의 풀림 부분은 풀림 과정에서 장력을 제어하기 위해 저마찰 실린더의 스윙에 의해 제어됩니다. ;
엘 다이 펀칭 중에 벨트가 위아래로 흔들리고 서보 모터가 나사 막대를 당겨 보정합니다. 예를 들어 다이가 오르내릴 때 서보 모터가 폴 피스의 길이를 빠르게 당겨 폴 피스 이송 과정에서 장력을 보장합니다. ;
엘 스윙 부분은 고정밀 비례 밸브, 고정밀 전위차계 및 저 마찰 실린더를 채택하여 동시에 공급을 제어합니다. ;
엘 스크류 로드는 서보 아날로그 양으로 제어되며 폴 피스의 크기에 따라 장력을 설정할 수 있습니다. ;
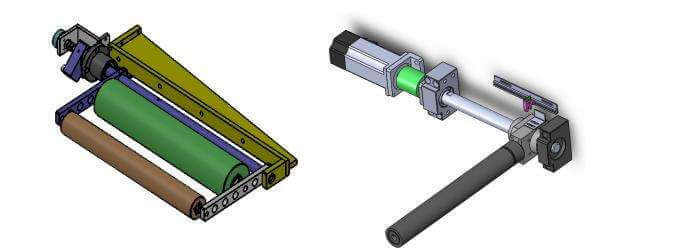
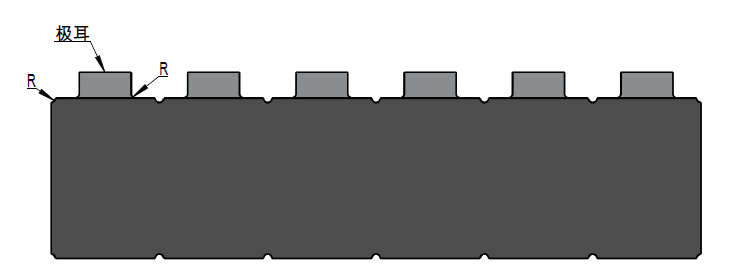
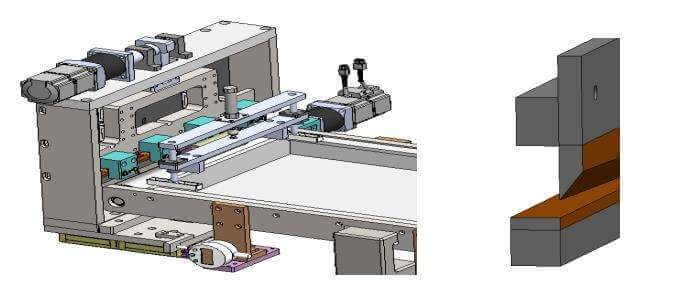
2. 탭 펀칭 및 성형 장치
엘 ㅏ 금속 오목 볼록 다이 펀칭 양식을 사용하여 성형을 완료하십시오. 탭
엘 상하 다이 펀칭은 가위 점 접촉 모드를 채택합니다. ;
엘 서보 구동 크랭크 샤프트는 다이의 고속 펀칭 작업을 완료하는 데 사용되며 폴 피스는 슬라이싱 과정에서 손상, 분말 낙하, 날카로운 모서리 및 기타 결함이 없습니다. ;
엘 다이의 분해 및 설치가 간단하고 폴피스의 폭 조절이 용이합니다. 일정 범위 내에서 다양한 크기의 폴 피스를 만날 수 있으며 교체 시간은 1시간 미만입니다. ;
엘 금형 하부에 깔때기 모양의 폐기물 수거장치를 설치하여 펀칭 및 절단 후 발생하는 폐기물을 즉시 깔때기 장치로 흡입 후 폐기물 재활용통에 수거할 수 있습니다. (교대당 1회 청소, 청소시간 ≤ 5분) ;
엘 다이의 상부 다이에는 다이의 펀칭 수명을 향상시키기 위해 양압 송풍 냉각 기능이 장착되어 있습니다. ;
엘 펀칭 메커니즘에는 안전 보호 광섬유와 안전 보호 커버가 장착되어 있습니다. ;
엘 이 시스템은 고정밀 CCD 편차 보정 센서를 채택하여 편차 보정 정확도를 향상시킵니다. , ≥0.2mm;
엘 매개변수 전극 펀칭 후 :
삼. 벨트 견인 장치
엘 재료 벨트 견인 및 운반 프로세스는 두 세트의 견인 롤러 어셈블리로 구성됩니다. ;
엘 동기화를 전달하는 고속 제어 릴링 프로세스의 첫 번째 세트 ;
엘 동기화를 전달하는 고속 제어 펀칭 센터 폴 피스의 두 번째 세트 ;
엘 서보 제어 불평등 거리 공급 기능 채택 ;
엘 이있다 탠 껍질 방지하기 위해 트랙션 롤러 앞의 가이드 휠 탭 다이 커팅 후 할인되지 않습니다. 모델 변경시 가이드 휠을 쉽게 조정할 수 있습니다. ;
엘 두 개의 롤러에는 분말 흡수 롤러가 직접 장착되어 롤러 견인 중에 쌓인 먼지를 제거합니다. ;
엘 프레싱 롤러는 에어 실린더에 의해 자동으로 압축되어 실을 꿰기에 편리합니다. .
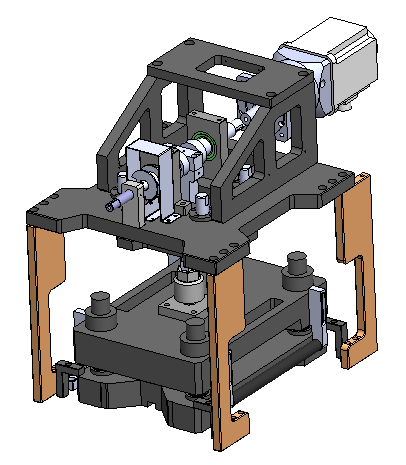
4. 절단 메커니즘
엘 나 n 폴 슬라이스 절단 과정에서 전면에는 프리 프레싱 기능이 있고 후면에는 트랙션 롤러가 있어 절단 전 폴 슬라이스의 연성과 극 슬라이스 분말 절단의 치수 정확도를 보장합니다.
엘 절단 후 장비에는 유도 광섬유가 장착되어 폴 나이프가 여러 조각의 폐기물로 오인되는 것을 방지합니다.
엘 하부 커터는 진공으로 설치되어 먼지를 흡수합니다.
엘 내장형 텅스텐 스틸 나이프를 채택하여 유지보수 및 교체 비용 절감 ;
엘 절단에는 계산 기능이 있습니다.
5. 전극 먹이통 보정 기능
엘 의 운영 중에 전극 , 서보 모터는 분류 메커니즘을 구동하여 전극 ;
엘 수정 후, 전극 재료 상자에 쌓여 있는지 확인합니다. 전극 재료 상자에 깔끔한 ;
엘 재료 상자에는 카운팅 기능이 있으며 폴 피스는 작동 및 적재시 손상, 압착, 구부러짐, 긁힘 및 기타 결함이 없습니다. ;
엘 때 전극 재료 상자가 채워지면 재료를 받기 위해 자동으로 버퍼 메커니즘으로 전환됩니다. .
5 、 먼지 제거 장치(옵션)
엘 1) 양모 휠, 먼지를 모으는 부압
엘 장비는 양모 휠과 음압 먼지 제거 방법을 채택하여 먼지 제거 효과가 우수하고 효율성이 높으며 비용이 저렴합니다.
엘 때 전자 밟다 청소 헤드의 입구 끝을 통과하고 구동 브러시를 굴려 분말을 쓸어내어 표면의 먼지를 제거합니다. 전극 ;
엘 이후 폴피스는 내부 부압풍을 받아 유류 먼지와 브러시 휠의 먼지를 흡수합니다. ;
엘 먼지는 부압 팬에 포집되어 청소가 용이합니다(월 1회, 청소 시간 ≤ 5분).
엘 1) 비접촉 분진 제거
엘 고압 이온풍의 비접촉 먼지 제거 방법을 채택하여 먼지 제거 효과가 좋고 효율성이 높으며 비용이 높습니다.
엘 때 전극 청소 헤드의 입구 끝을 통과하면 여기의 이온화 구름과 코일 표면의 정전기가 제거됩니다.
엘 그런 다음 전극 청소 헤드 장치의 내부 송풍 및 진공 공기 흐름에 의해 발생하는 난기류의 영향을 받습니다. ;
엘 난기류의 영향으로 인해 고주파 프레팅이 발생합니다. 이자형 전극 ;
엘 고주파 프레팅과 난기류의 결합된 작용 전극 폴 피스 표면의 공기 계면층을 파괴함과 동시에 계면층에서 방출된 오염 물질을 진공 기류로 흡입 ;
엘 때 전극 청소 헤드를 떠나면 폴 피스는 다른 이온 구름을 통과하여 표면의 2차 오염을 방지합니다. 전극.
6. 디자인 특징
특징 |
장점 |
비접촉 청소 |
표면에 자국 및 손상의 위험을 피하십시오. 전극 , 동시에 위치 추적 감지에 영향을 미치지 마십시오. 전극 벨트에 |
정전기 제어 통합 |
정전기 중화, 세정 성능 최적화, 시트 표면의 2차 오염을 효과적으로 사전 분극화 |
고유한 "고정 포트" 시스템 |
청소 헤드의 파이프라인 연결이 고정되어 청소 헤드의 설치가 더 쉽습니다. |
풍량 균형 |
송풍량과 진공 공기 흐름 사이의 편차 값을 완벽하게 제어할 수 있습니다. |
자동 진공 제어 |
작업자가 수동으로 조정하는 빈도를 줄입니다. 최상의 세척 효과를 자동으로 유지 |
무손실 부품 |
낮은 운영 비용 |
조용한 작동 |
소음으로 인한 건강 및 안전 문제 없음 |
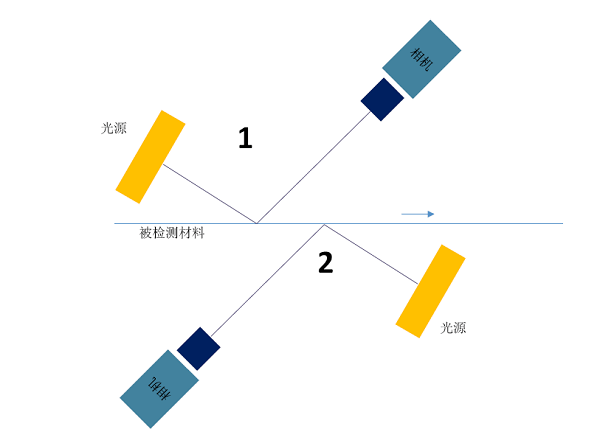
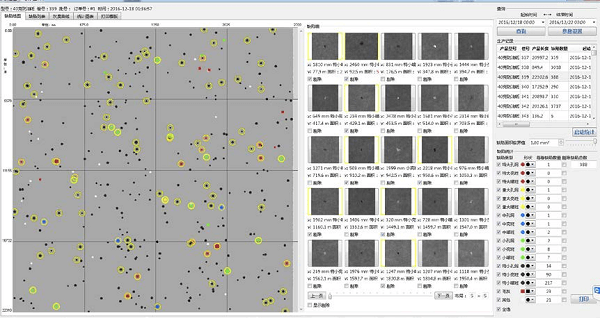
7. CCD 검출 및 라벨링의 개략도(옵션 장치)
엘 지능형 분류: 기계 학습 및 인공 지능 기술을 사용하여 사용자의 결함 범주 정의에 따라 자체 학습 및 자동 분류를 수행할 수 있습니다.
엘 PostgreSQL: 결함 위치, 크기 및 기타 정보와 같은 결함 이미지를 저장하기 위해 가장 진보된 오픈 소스 데이터베이스를 채택합니다. ;
엘 자동 아카이빙: 결함 데이터는 사용자 설정에 따라 외부 장치 또는 시스템에 자동으로 백업될 수 있습니다.
엘 다양한 보고서: 테스트 결과 및 통계 데이터에 대한 보고서를 표 및 그래프 형태로 제공
엘 표면 평활도 분석 : 재료의 평활도를 디지털로 실시간 표시 ;
엘 실용적이고 편리한 작동 인터페이스: 심각한 결함 및 기타 실용적인 기능을 제거하고 표시할 수 있어 작업자가 작동하기 편리합니다.
엘 IO 인터페이스: 알람, 페이퍼 브레이크, 롤 변경, 시작 및 정지와 같은 입력 및 출력 신호를 제공합니다.
엘 공장 인터페이스: Windows 운영 체제를 기반으로 tcp/ip, 이더넷, OPC 및 기타 인터페이스를 통해 고객의 다른 시스템 및 장비와 연결할 수 있습니다. ;
엘 원격접속 유지보수 : 장비가 인터넷에 연결된 상태에서 인터넷 원격접속을 통해 시스템 업그레이드 및 유지보수 가능 ;
엘 기술 지원: 7 x 24시간 네트워크 및 핫라인 지원
엘 디 감지 시스템 인터페이스
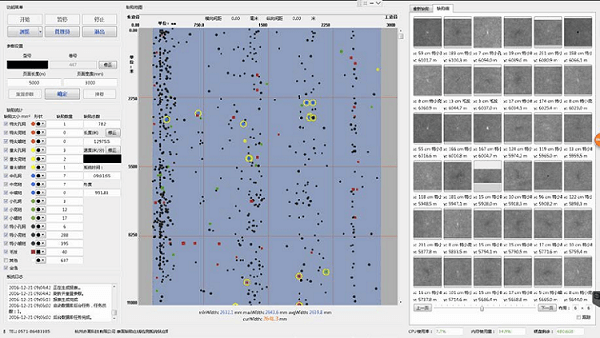
엘 보고서 보기 인터페이스
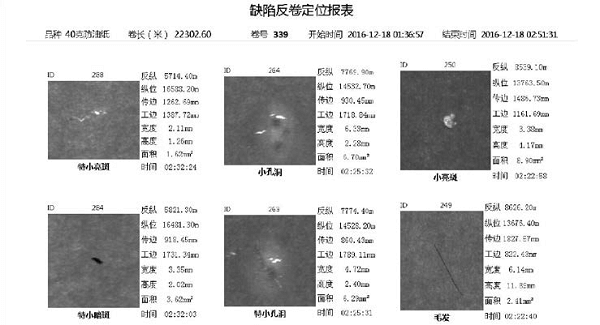
엘 디 결함 제거 보고서
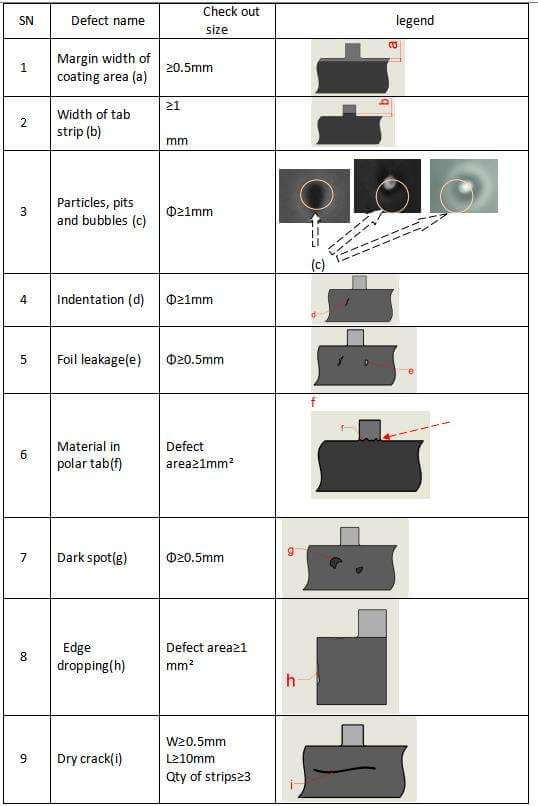
엘 주요 결함 검출 정확도 지수 테이블
엘 라벨링 기계 장치 이자형:
라벨링 기계 세트가 장착되어 붙여 넣기 속도가 절단 속도와 일치하고 라벨링 중심선과 폴 피스의 내부 가장자리 거리를 ± 2mm의 정확도로 조정할 수 있습니다.
라벨 크기: 폭 12mm, 길이 14mm로 사용자가 맞춤화할 수 있습니다.
ㅏ 、 들어오는 재료의 크기 및 사양
SN |
안건 |
투기 |
주목 |
1 |
피드 폭 |
300 - 420 mm ( 탭 포함 ) |
|
2 |
들어오는 재료 두께 |
음극 : 9 - 200 μm ; 양극 : 9 - 200 μm |
|
삼 |
배출 드럼의 내경 |
6 인치 φ 150 .2mm |
|
4 |
적용 가능한 시스템 |
인산철리튬, 산화코발트리튬, 망간산리튬, 삼원물질, 흑연 및 기타 배터리 및 커패시터 슬러리 시스템 |
|
5 |
외경 전극 시트 |
≤φ700mm |
|
6 |
코팅 방법 |
연속 코팅 |
|
7 |
들어오는 코팅 폭 오류 |
≤±2mm |
비 、 생산 입고 자재 요구 사항
엘 들어오는 권선 끝면의 균일성 오류 : ±5mm ;
엘 사문석 오류 : X±2mm/m ;
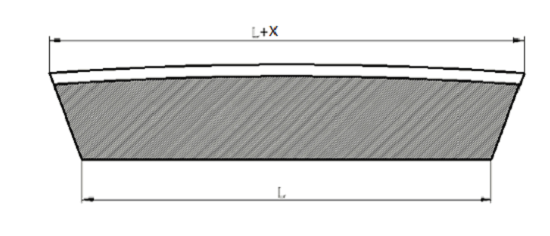
엘 전극 파도 : 엑스 ± 5mm/분 ;
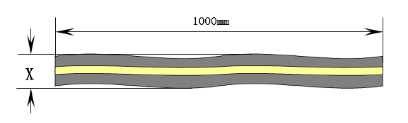
엘 금형의 수명을 보장하고 금형 절단 위치에서 재료 두께의 변화가 10μm 미만입니다.
씨 、 장비 생산 공정
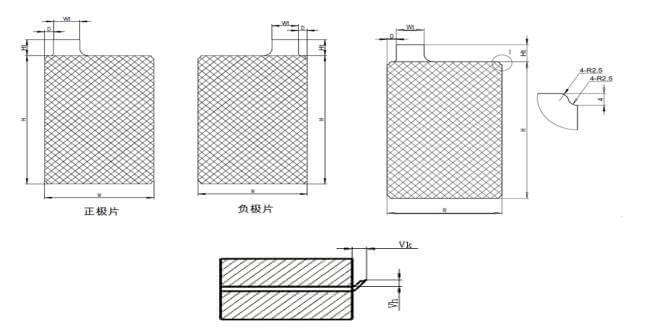
크기 범위 및 정확도 전극 펀칭 후 |
||||
SN |
안건 |
크기 ( mm ) |
정확성 |
주목 |
1 |
전극 여 |
40 ~ 110 |
±0.2mm |
|
2 |
전극 시간 |
60 ~ 160 |
±0.25mm |
|
삼 |
전극 Ht |
10 ~ 30 |
±0.2mm |
|
4 |
전극 디 이스탠스 |
5~ 20 |
±0.25mm |
|
5 |
전극 무게 |
6 ~ 65 |
±0.2mm |
|
6 |
규석 vh |
≤7um |
|
|
7 |
규석 vk |
≤25um |
|
|
디 、 장비의 기술 지표 매개변수
SN |
안건 |
투기 |
1 |
펀칭 방법 |
다이 펀칭 |
2 |
다이 수명 탭 및 마크 구멍 |
음극금형 100만회 / 연삭, 금형연마횟수 10회 이상 800000회/포지티브 몰드 연삭 및 몰드 연삭 횟수 ≥ 10회 수리 후 다이 커팅 나이프의 총 수명: ≥ 천만 회 |
삼 |
적재 조건 |
수동 롤 로딩 기능, 장비는 잔류 물질 감지 및 경보 기능을 실현할 수 있습니다. 롤 터미네이션 테이프와 테이프 스플라이싱 테이프를 구분할 수 있습니다(테이프 색상이 다름). |
4 |
전극 편차 보정 장치 |
재료에 에지 결함이 없다는 전제하에 편차 보정 정확도는 0.1mm로 보장됩니다. |
5 |
전극 장력 조절 |
장력 제어 정확도 < 10% |
6 |
스탬핑 다이 |
SKD-11 + 수입 합금 텅스텐강 |
7 |
먼지 제거 장치 |
양쪽 먼지 제거 전극 펀칭 후 |
8 |
자석 흡착 |
≥40000GS영구 자석 막대 |
9 |
CCD 테스트 |
폴 피스의 전면과 후면에 각각 CCD 감지 장치 세트가 설정되어 있습니다. |
10 |
CCD 구성 |
8K 카메라 2 PC , 광원 2 PC |
11 |
CCD 탐지 범위 |
최대 4 50mm ( 코팅 폭: 4 00mm ) |
12 |
CCD 테스트 항목 |
노출박, 건조물, 흑점, 긁힘, 이물질 등 표준 리튬전지 극편의 코팅결함 |
13 |
CCD 테스트 항목 |
티 가로방향0.1mm 、 피 ortrait : 0.1mm ( 최상의 감지 상태 ) ( 80m/분 , 절단 속도) |
14 |
CCD 시스템의 다른 기능 |
결함의 크기, 유형, 밀도, 절단 위치 및 주기에 따라 알람 출력 또는 라벨링을 제공할 수 있습니다. 검출된 모든 결함 데이터는 각 볼륨의 SQL 데이터베이스에 저장되거나 공장의 정보 관리 시스템 또는 다양한 표준 데이터베이스로 내보내집니다. Reportranger 소프트웨어는 필요에 따라 생산 및 품질 관리에 대한 다양한 자동 보고서를 자동 또는 수동으로 출력할 수 있으며, 고객의 요구에 따라 설정할 수 있고, 재료의 가장자리에 정확하게 레이블을 지정하고, 다운스트림 프로세스와 협력하여 다양한 결함을 더 잘 찾고 처리할 수 있습니다. . |
15 |
라벨링 메커니즘 |
라벨 절단 및 라벨링 메커니즘; 라벨링 속도는 당기는 속도와 일치하며 라벨링 기계는 탭 |
16 |
MES 체계 |
사용되는 모든 프로세스 장비에는 MES 시스템 인터페이스가 있어야 합니다. |
17 |
능률 |
≥ 120 ppm , 동원율≥95% , 자격이 된 rate≥98% |
18 |
빠른 변경 시간 |
단일 교체 금형의 모델은 다음을 초과하지 않습니다. 1 사람 *1시간 |
19 |
기타 요구 사항 |
1. A. 장비 프로그램의 업데이트는 원격을 통해 실현될 수 있습니다. 비. 하드웨어(전기) 감지 네트워크가 있는 노트북은 원격 모드로 구성되어 있으며 원격 제어에 필요한 소프트웨어가 노트북에 설치되어 있습니다. 장비 제조업체는 노트북을 통해 장비와 원격 제어를 실현합니다. 데이터 보안을 위해 노트북에 모니터링 프로그램을 설치하여 노트북을 통해 교환되는 모든 데이터를 모니터링합니다. 2. 장비의 계층적 관리: 최소 세 가지 수준이 필요합니다. 가장 높은 수준은 장비에 대한 모든 작업을 실현하고 모든 암호를 재설정할 수 있는 장비의 관리 권한입니다. 두 번째 수준은 장비의 모든 매개변수를 변경하고 장비 작동을 실현하는 것입니다. 가장 낮은 수준은 장비 작동 및 일부 작업 변경입니다. 설비 가동시간 기록기능, 기록내용은 자동운전시간, 대기시간, 수동운전시간, 고장시간으로 구분하여야 한다. 기계시간은 장비의 전원을 켰으나 아무런 조작도 하지 않는 시간으로 정의하고, 폴트시간은 장비가 고장나 에러메시지가 사라지지 않고 비상정지 버튼을 눌렀을 때까지의 시간으로 정의한다. ; 자동운전과 수동운전은 장비가 고장이나 오류가 없는 정상적인 운전시간이며, 선택한 운전모드에 따라 구별할 수 있습니다. 최소 2일간의 작동 기록을 장비에 보관해야 합니다. 작업 기록은 하루에 한 번 패키지화되어 MES 시스템 또는 기타 관리 시스템으로 전송되고 FTP를 통해 업로드됩니다. 업로드된 파일은 CSV 형식이어야 합니다. 장비 파라미터 변경 기록 기능. |
20 |
진동 기준 |
진동 강도는 장비 진동에 대한 iso-2372 국제 표준을 충족해야 합니다. (진동 강도 ≤ 0.45mm/s) |
21 |
안전 장치 |
1. 펀칭 메커니즘, 절단 메커니즘 및 기타 메커니즘에는 작업자가 출입하지 못하도록 안전 보호 도어가 장착되어 있으며 도어 개방 보호 회로 설계 및 비상 정지 기능이 있으며 안전 경고가 있습니다. 2. 오류 경보 표시기는 3색 램프 포스트 및 부저 경보이며 터치 스크린 패널에 기록 표시가 있습니다. |
이자형 、 장비의 주요 구성 요소
SN |
이름 |
상표 |
1 |
PLC |
파나소닉 |
2 |
터치 스크린 |
와인뷰 |
삼 |
주파수 변환기 |
슈나이더 |
4 |
서보 모터 |
파나소닉 |
5 |
스테퍼 모터 |
Leisai |
6 |
실린더 및 공압 부품 |
에스엠씨 |
7 |
리니어 가이드 레일, 스크류 로드 |
THK |
8 |
감지기 |
킨스 |
9 |
베어링 |
NSK |
10 |
솔레노이드 벨브 |
에스엠씨 |
11 |
온도 조절기 |
오므론 |
12 |
자동 제어 밸브 |
Shanghai Ziyi |
13 |
진공계/압력계 |
에스엠씨 |
14 |
저전압 전기 부품 |
슈나이더 |
15 |
CDD 테스트 |
Chixiao 기술 |
16 |
곰팡이 |
Wei Sheng |
17 |
다이 가이드 포스트 |
미스미 |
18 |
광섬유 |
파나소닉 |
19 |
마그네틱 스위치 |
에스엠씨 |
20 |
저전압 전기 부품 |
슈나이더 |
에프 、 장비 사용 환경
SN |
안건 |
단위 |
투기 |
주목 |
|
1 |
전체 라인 전력 |
Kw |
15 |
380V , 3상 |
|
2 |
압축 공기 |
압력 |
MPa |
0.5 ~ 0.8MPa |
|
|
|
소비 |
L/분 |
50 |
|
삼 |
진공 |
진공도 |
KPa |
/ |
|
|
|
소비 |
m3/h |
/ |
|
|
|
소비 |
m3/h |
/ |
|
4 |
질소 |
압력 |
MPa |
/ |
|
|
|
소비 |
m3/h |
/ |
|
5 |
수돗물 사용량 |
m3/h |
/ |
|
|
6 |
공정 냉각수 |
온도 |
℃ |
/ |
|
|
|
소비 |
m3/h |
/ |
|
참고: 장비와 관련된 매개변수는 반드시 입력해야 하며 관련되지 않은 매개변수는 "/" 또는 "-"로 입력할 수 있습니다. 。 |
|||||
G 、 예비 부품
SN |
이름 |
투기 |
수량 |
주목 |
1 |
펀칭 도구 |
|
|
|
2 |
다이 커팅 도구 |
|
|



 +86 13174506016
+86 13174506016 David@tmaxcn.com
David@tmaxcn.com

